第二章计算
应力、应变计算
公式1: 泊松比 \(\mu = \text{径向}/\text{轴向}\),两个应变方向相反所以最后添加异号。
公式2: \(F=E \cdot \epsilon\),其中 \(E\) 是弹性模量。
计算电阻变化
\[ \frac{\Delta R}{R} = k \cdot \epsilon \]
**接入电桥后的计算公式:
很复杂,要根据不同情况讨论:
单桥电路
$\( U_o = \frac{U}{4} \cdot \frac{\Delta R}{R} \)\( 非线性误差:\)\frac{\Delta R}{2R_0}$。
题请注意电容电感的非线性误差是 \(\frac{\Delta d}{d_0}\),没有 \(1/2\)。
半桥电路
最简单的半桥,只提高灵敏度: $\( U_o = \frac{U}{2} \cdot \frac{\Delta R}{R} \)$ 简单半桥同时也可以降低非线性误差 & 温度补偿。
只补偿温度误差的半桥: $\( U_o = \frac{U}{4} \cdot \left(\frac{\Delta R_1}{R} - \frac{\Delta R_2}{R}\right) \)\( 其中 \)\frac{\Delta R_1}{R}\( 是应变效应造成的应变片电阻变化,而 \)\frac{\Delta R_2}{R}$ 是温度造成的应变片电阻变化。
总之这个时候灵敏度和单桥一样。 - 一个受拉一个受压,且存在泊松比: $\( U_o = \frac{U}{4} \cdot \left(\frac{\Delta R_1}{R} - \frac{\Delta R_2}{R}\right) \)\( 其中 \)\frac{\Delta R_1}{R}$ 是主要应变造成的应变片电阻变化。
假设径向应力,且径向应变是正的。 那么: $\( \frac{\Delta R_1}{R} = k\epsilon_{\text{径}}, \quad \frac{\Delta R_2}{R} = k\epsilon_{\text{轴}}, \quad \frac{\epsilon_{\text{径}}}{\epsilon_{\text{轴}}} = -\mu \)\( 推导得: \)\( U_o = \frac{U}{4} \cdot k \cdot (1+\mu) \cdot \epsilon_{\text{径}} \)$
全桥电路
三个情况同半桥,结果 \(\times 2\) 就行。
梁公式
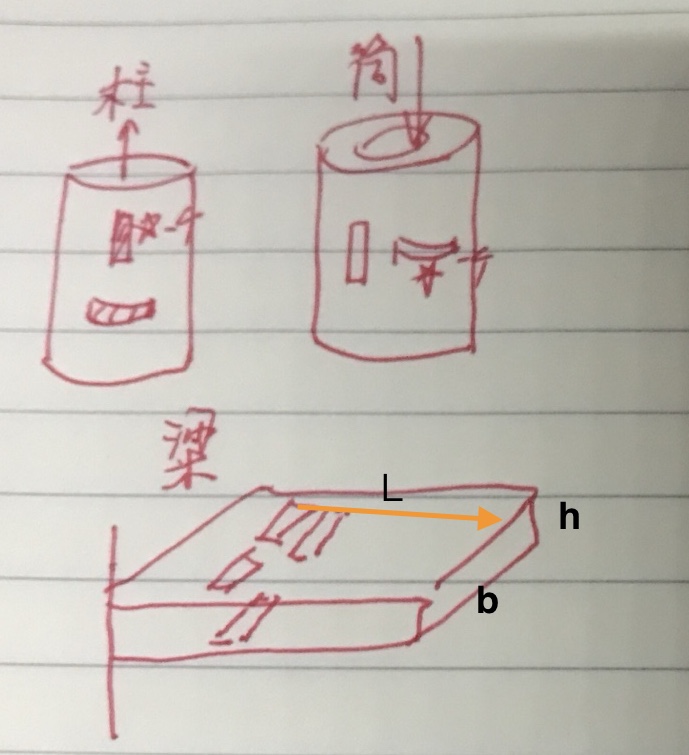 $\(
\sigma = \frac{6\delta \cdot l}{Sh}
\)\(
其中 \)\delta=F/E\(,\)S=bh$。
$\(
\sigma = \frac{6\delta \cdot l}{Sh}
\)\(
其中 \)\delta=F/E\(,\)S=bh$。
第 5.5 章 霍尔传感器计算
原理推导
\[ qE = qvB \]
\[ I = nqsv \]
消掉 \(v\),得霍尔电动势: $\( E = \frac{BI}{nqS} \)$
\(S\) 与 \(I\) 垂直。灵敏度要除以 \(B\) 和 \(I\): $\( k = \frac{E}{IB} = \frac{1}{nqs} \)$
霍尔系数
\[ R_h = \frac{1}{nq} = \rho\mu \]
其中 \(\rho\) 是电阻率,\(\mu\) 是载流子迁移率。
重要画图
霍尔元件、传感器基本电路、霍尔元件等效电路、不等位电动势补偿电路、恒流源温度补偿原理。
第六章 电容传感器
电容的串联和并联
相同极性粘在一起(并联): \(Q' = 2Q\)
+| +
电容距离d
-| -
不同极性接在一起(串联): \(U' = 2U\)
+
电容距离d
-
+
电容距离d
-
刚度固有频率
\[ \omega = \sqrt{\frac{k}{m}} \]
变气隙电感 L0=u0A0N^2/2d0
k=1/d0,差动2/d0